DLR - RESQ
Autonomer Hilfsgütertransport RESQ
Das autonome Fahren eröffnet nicht nur neue Wege im Wirtschaftssektor, es kann auch dabei helfen, Menschen in überlebenswichtigen Situationen zu unterstützen.
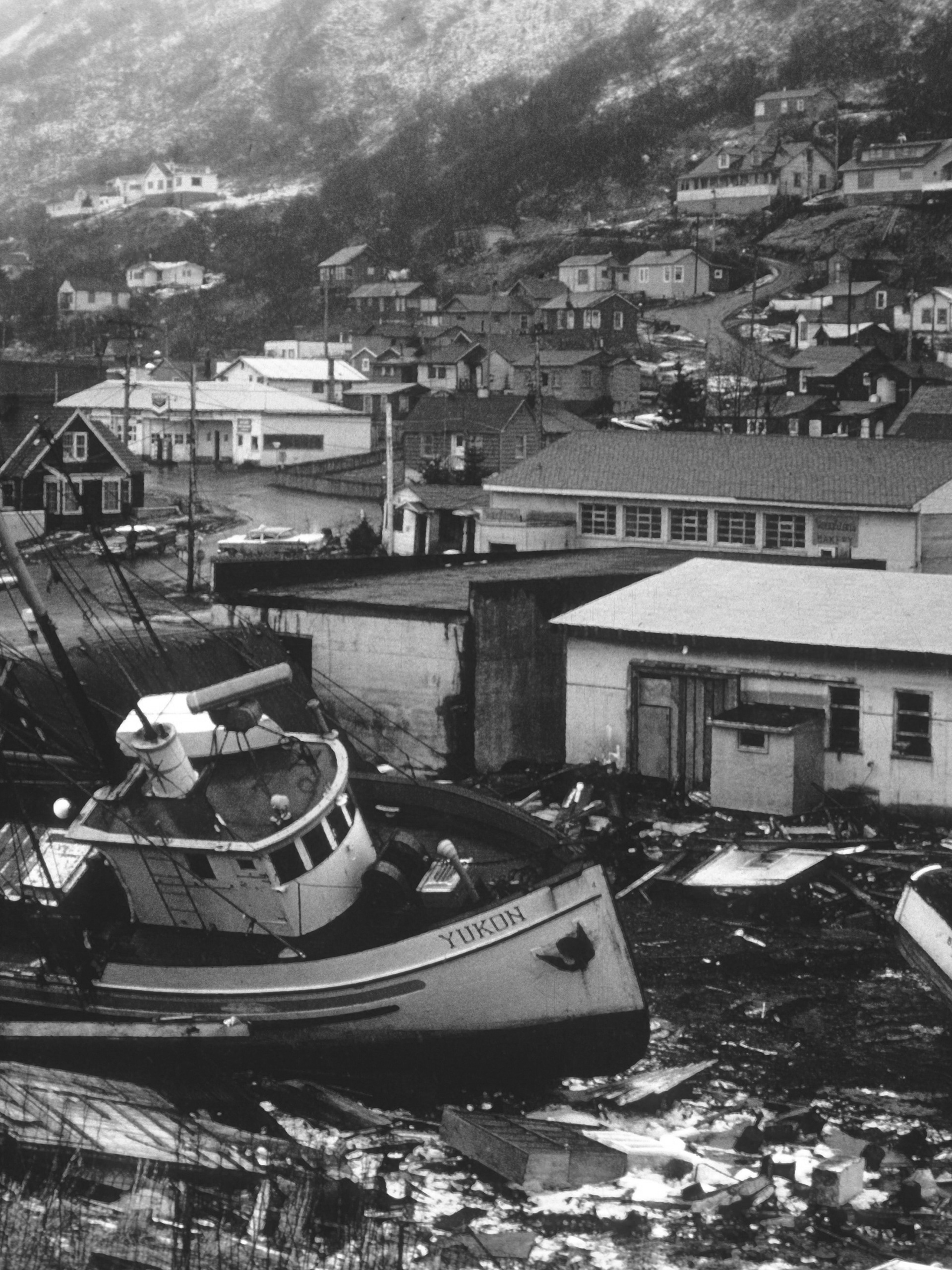
In Katastrophenfällen sind oft eine Vielzahl an Menschen in ihrer Existenz bedroht, darunter vor allem Verletzte, Vorerkrankte, Pflegebedürftige, Kinder, Schwangere, Behinderte und andere hilfsbedürftige Personen. Natürlich können auch uneingeschränkte Personen durch Notfälle in Situationen kommen, die ihr Leben bedrohen. In solchen Situationen werden oft lokale Unterstützer benötigt, um Menschen aus ihrer schwierigen Lage zu befreien.
Auch externe, freiwillige Helfer werden benötigt, um den Geschädigten in akuten Situationen überlebenswichtige Unterstützung zuzusichern. Diese Helfer übernehmen Aufgaben, die vor allem mental nicht von Robotern zu ersetzen sind.
Der Transport von Hilfsgütern sollte jedoch keine Helfer benötigen, die an anderer Stelle viel dringender gebraucht werden würden. Darum lässt sich mit der Hilfe von künstlicher Intelligenz eine effektive und automatisierte Lösung schaffen, die die Rettungskette vereinfacht und einen effektiven Beitrag zum Katastrophenschutz leistet.
In Kooperation mit dem Deutschen Zentrum für Luft- und Raumfahrt entstand das Projekt RESQ.


Naturkatastrophen Humanitäre Katastrophen Versorgungsengpässe
Überschwemmungen Erdbeben Konflikte & Kriege Dürren
Brände Gesundheitskrisen Fehlende Infrastruktur
Tornados / Hurrikanes Erdrutsche Bevölkerungsbewegungen Lebensmittelengpässe
Brände Gesundheitskrisen Fehlende Infrastruktur
Tornados / Hurrikanes Erdrutsche Bevölkerungsbewegungen Lebensmittelengpässe

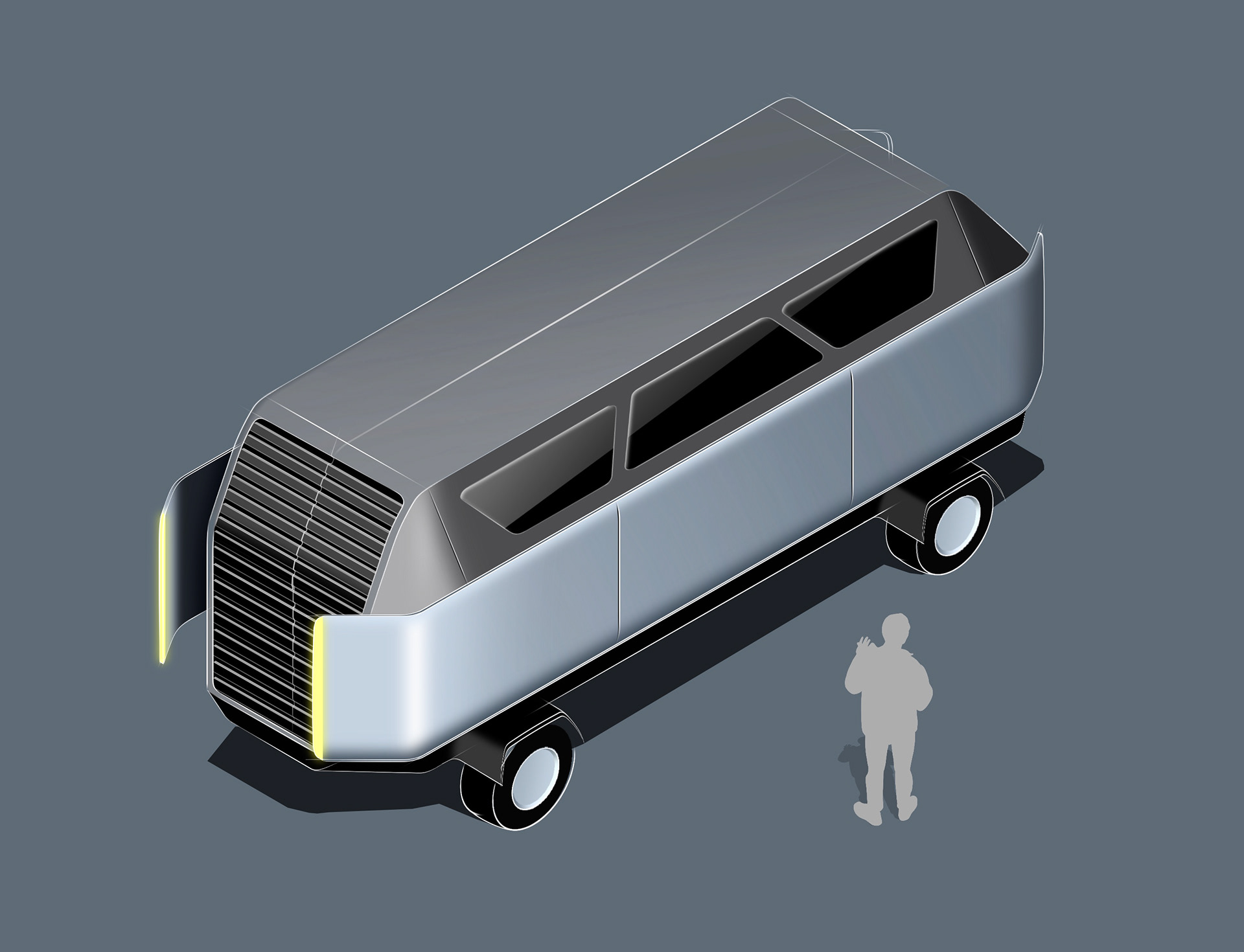
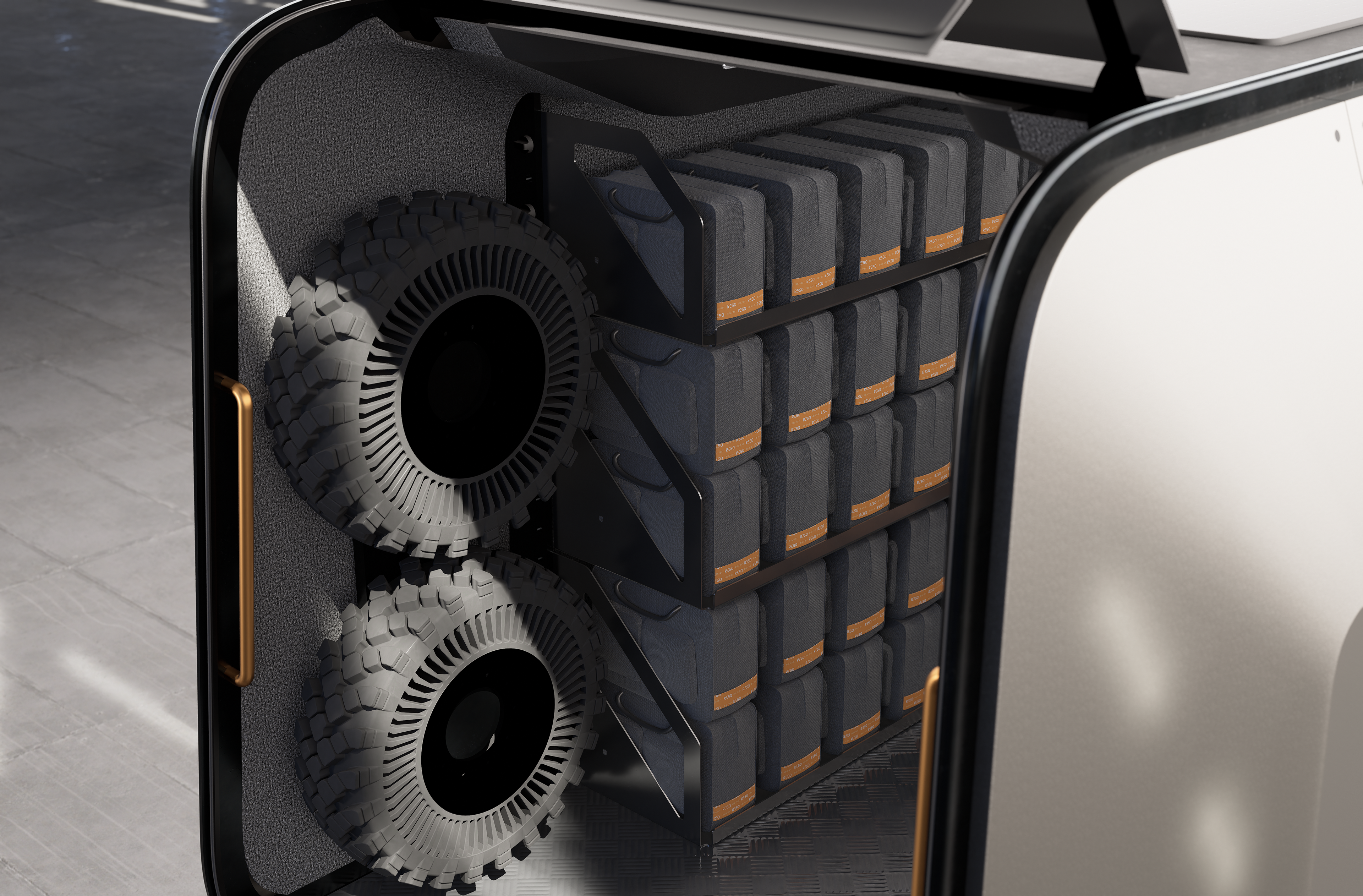
Um hilfsbedürftigen Personen in lebensbedrohlichen Lagen mit Hilfsgütern zu versorgen, ist ein Fahrzeug mit größtmöglichem Fassungsvermögen nötig. Es sollte Grundlagen bereitstellen, auf die die Personen angewiesen sind. Neben Trinkwasser, Nahrung und Unterkünften gehören auch Werkzeuge, Kleidung und Hygieneartikel zu den elementaren Bestandteilen der Versorgung von Menschengruppen.
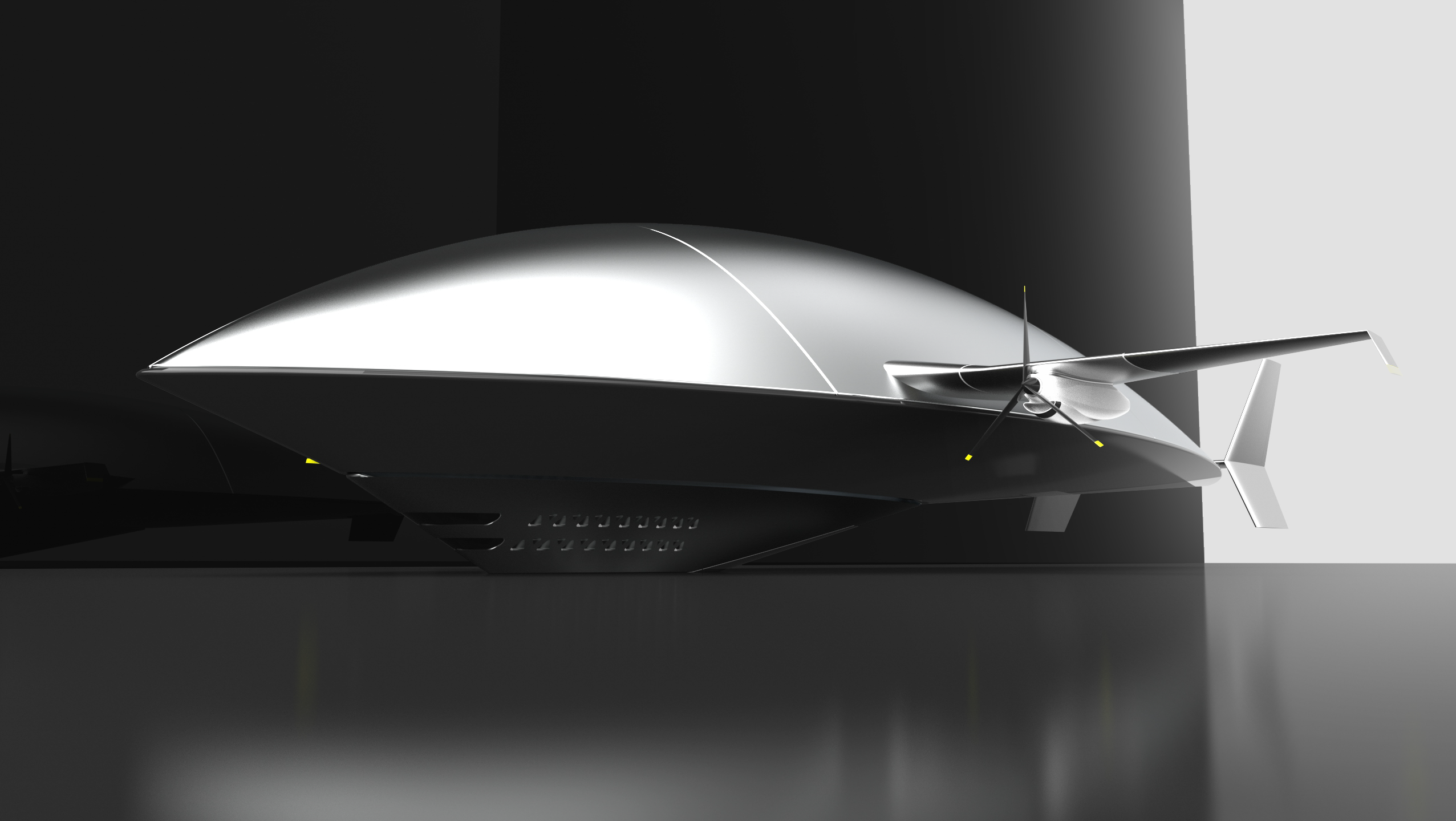
„Resilient emergency support and quest“ ist der Entwurf eines autonomen Hilfsgütertransportes zur Versorgung von Menschengruppen nach oder während eines Katastrophenfalles. Es hat die Aufgabe, genannte Hilfsgüter sicher und zuverlässig von einer Basisstation zu einem Unglücksort zu transportieren. Ausgehend von der Basisstation, werden im Katastrophenfall ein oder mehrere Fahrzeuge auf einen vorprogrammierten Standort geleitet. Diesen Weg muss das Fahrzeug situationsgerecht und in Echtzeit beschreiten. Die oberste Priorität des Systems ist dabei eine zuverlässige Versorgung der Helfer und Hilfsbedürftigen.

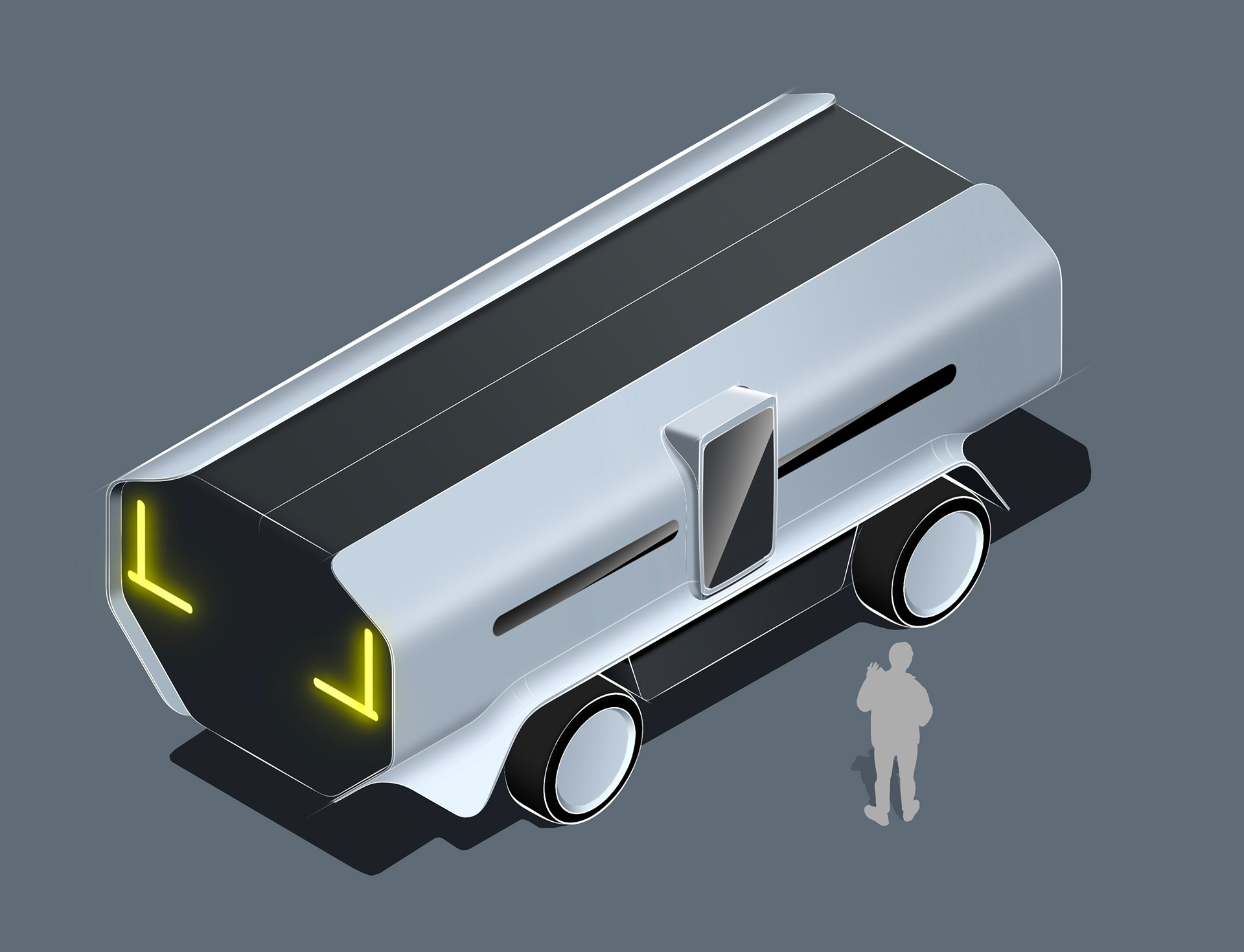
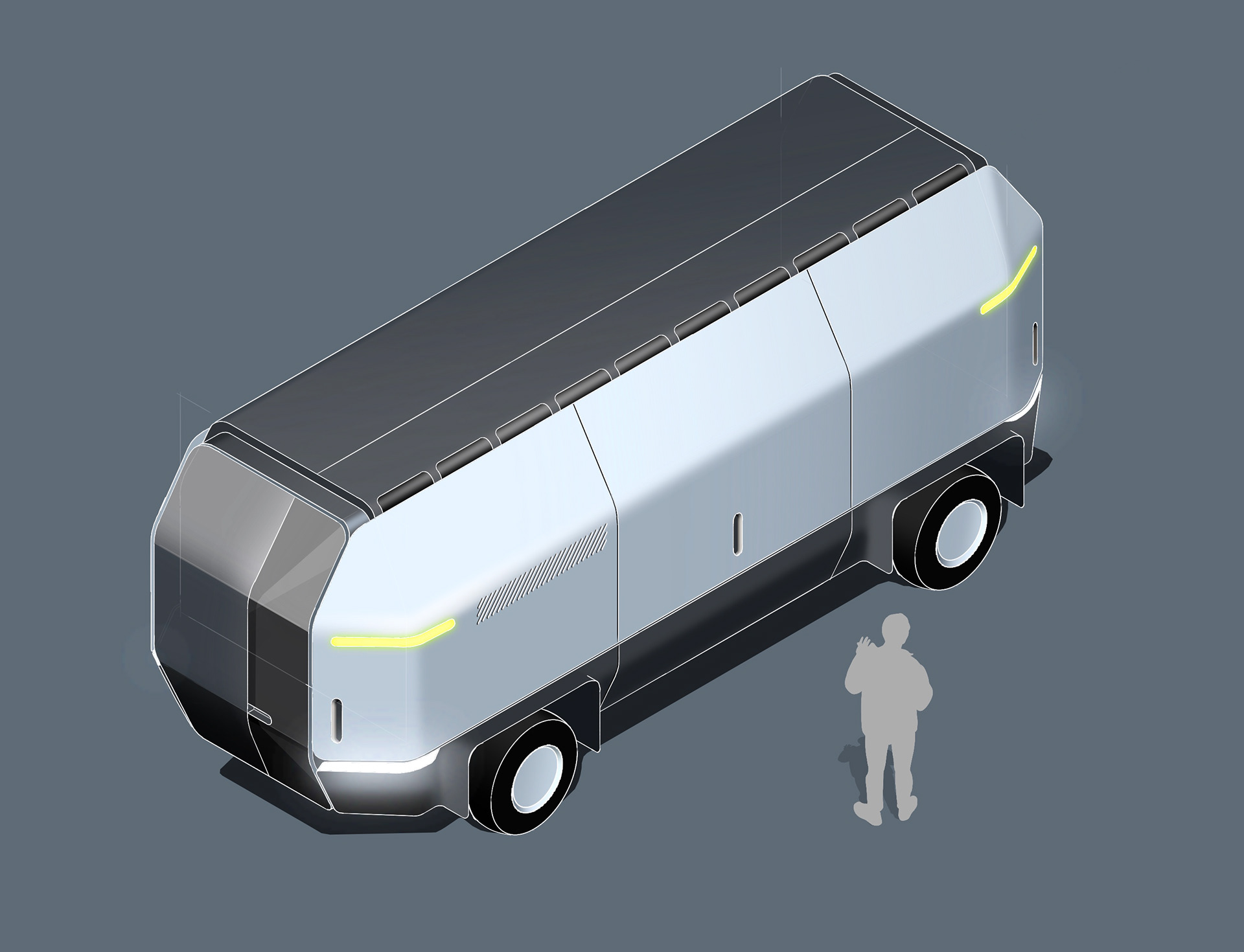


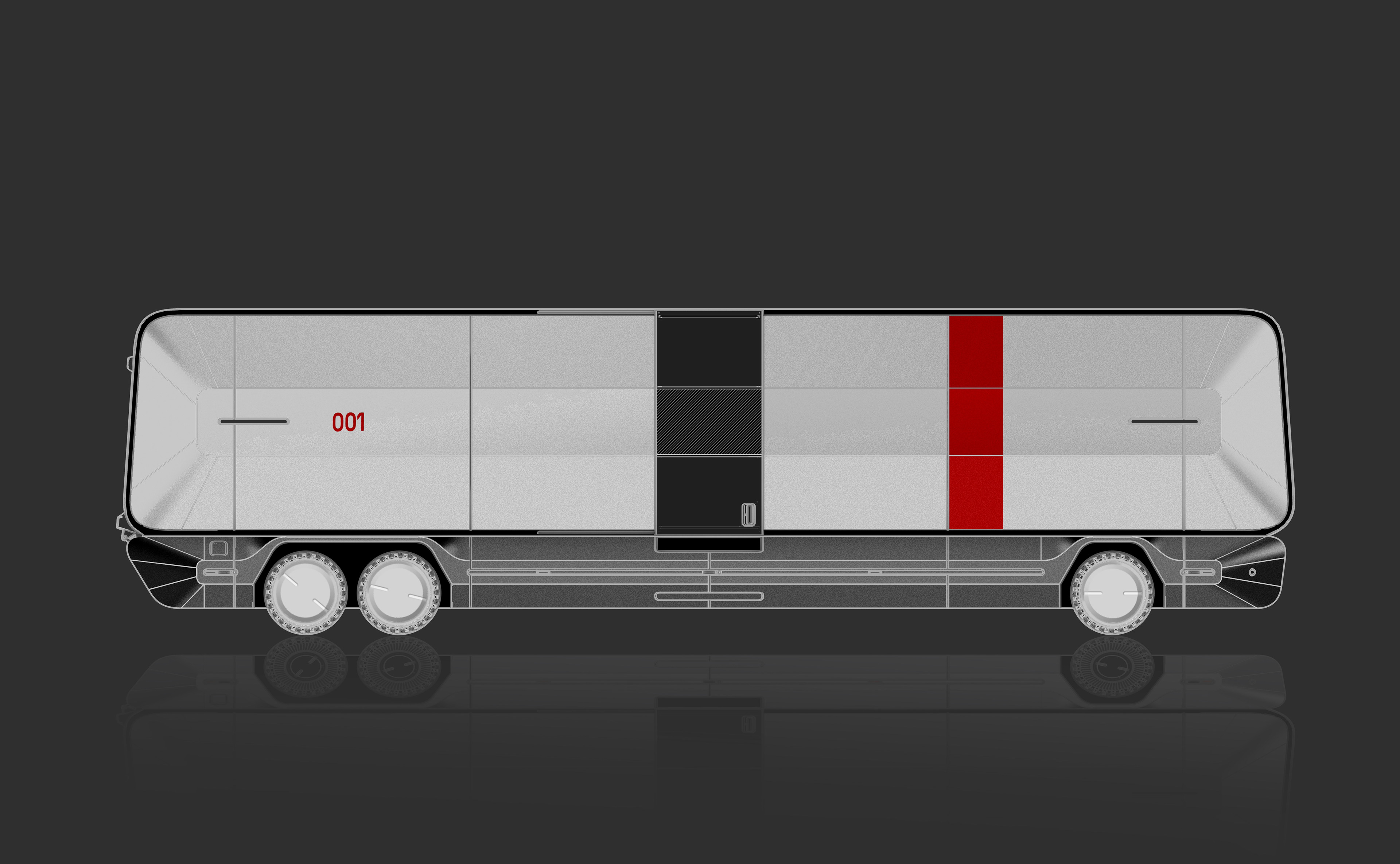
Zusammensetzung aus Triebfahrzeug und Ladecontainer.
Triebfahrzeug enthält alle Komponenten, um eigenständig betrieben werden zu können.
Ladecontainer kann durch andere Aufbauten wie einen ISO Container oder als Ladefläche ersetzt werden.
Symmetrische Enden und Seitenflächen zur effizienten Fertigung.
Packvolumen von 37 m3.
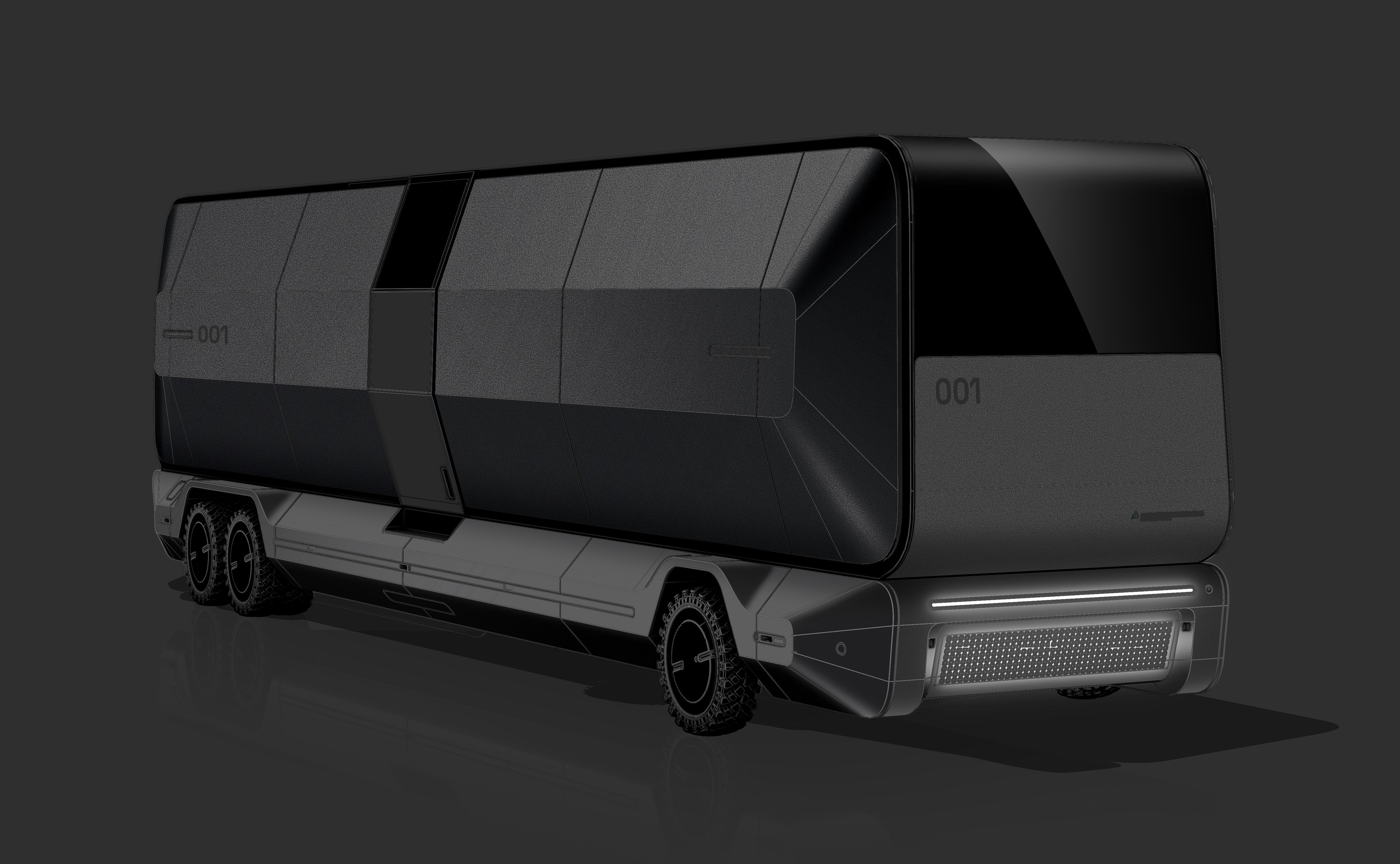
Motorisierte Plattform mit autonomer Fahrzeugsteuerung.
Dreiachsiger Heckantrieb, elektrisch. Rimac-Motoren, dual.
Drei Batterie-Einheiten mit insgesamt 96 LG Zellmodulen.
Angestrebte Gesamtreichweite von 600 km
Symmetrische Ladeanschlüsse Typ CSS.




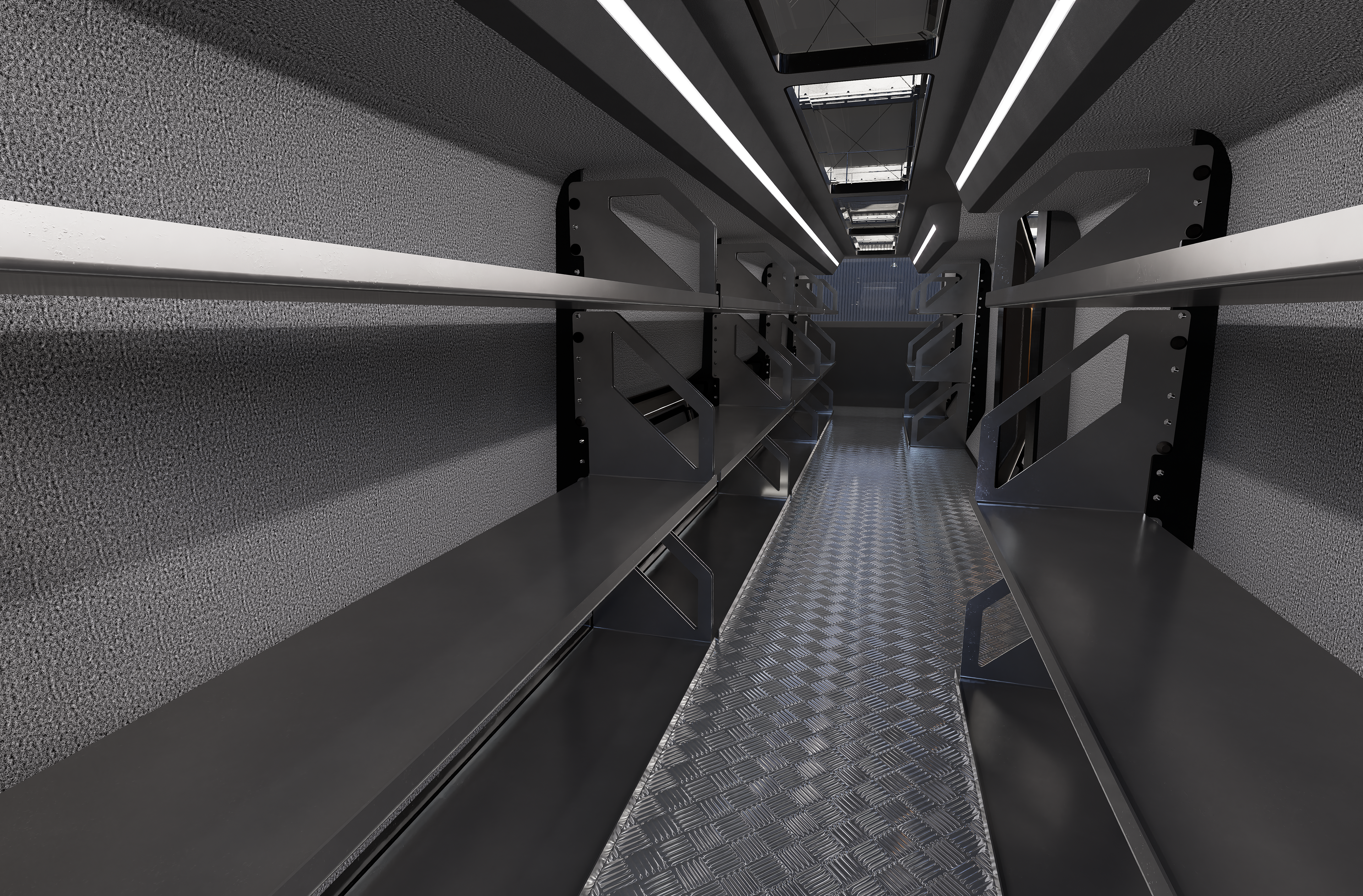
Verteilung von essenziellen Versorgungsgütern auf das Regalsystem.
- Medizinischer Ausrüstung - Notnahrung (EPA)
- Trinkwasser
- Hygieneartikeln
- Kleidung und Decken
- Kleine Werkzeuge
- Kommunikationselektronik
Die Vorräte können bis zu 320 Personen für 24 Stunden oder 12 Personen für bis zu einem Monat versorgen.

Technischer Aufbau
Rimac SPM 900
Leistung: 450 kWh
Insgesamt zwei Rimac SPM Motoren verbaut.
Kombinierte Leistung von max. 900 kWh (1223,7 PS).
Umsetzung über zwei Differenziale.
„Airless tires“ für geringere Ausfallwahrscheinlichkeit.
Grobes Profil für höchstmögliche Traktion auf unterschiedlichen Untegründen und beschädigten Fahrbahnen.
Stahlfelge nach LKW-Standard.
Geschlossene Radkappen zur Vermeidung von Verschmutzungen & verbesserter Aerodynamik.
Doppelbereifung an den zwei Hinterachsen.


26 LIDAR-Sensoren entlang des Fahrzeugrandes zur Tiefenerfassung der Umgebung in 360°.
8 Farbbild-Kameras entlang des Fahrzeuges zur visuel- len Unterstützung der Tiefeninformation.
Überlagerung von Farbbildern und LIDAR-Daten zur Er- fassung der gesamten Umgebung.
Um tote Winkel zu vermeiden, befinden sich zusätzliche Näherungssensoren an den Eckflanken der Karosserie.

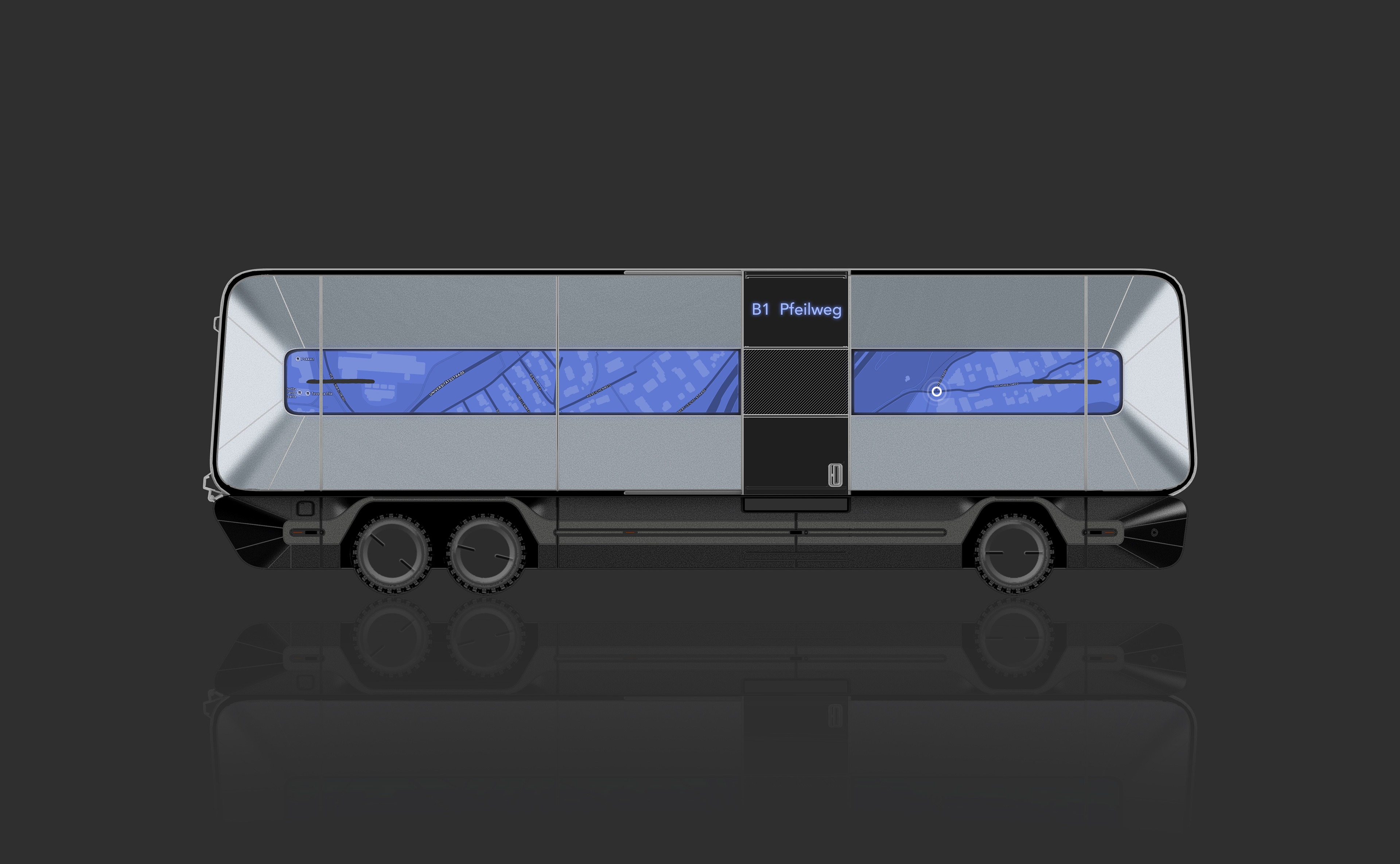
Pixelraster erweitert Interaktion mit dem Umfeld.
Anweisungen können intuitiv und audiovisuell übermittelt werden.
Weitere Warnhinweise an wichtigen mechanischen Baugruppen.


Fahrzeugkolonne / Gruppenautomation
Zur einfachen Zuordnung können die Fahrzeuge nummeriert werden.
Der Flottenverband profitiert durch autonomes Fahren und IOT und steigert so die Effizienz, Skalierbarkeit und Sicherheit.
So können in kurzer Zeit große Gebiete autonom versorgt werden.

Variabler Einsatzzweck
Durch den Modularen Aufbau sind auch andere Einsatzgebiete denkbar.
So kann die Plattform variabel auf das entsprechende Szenario angepasst werden.
1. Krankenwagen
2. Citybus
3. VIP Transport


RESQ
Um hilfsbedürftigen Personen in lebensbedrohlichen Lagen mit Hilfsgütern zu versorgen, ist ein Fahrzeug mit größtmöglichem Fassungsvermögen nötig. Es sollte Grundlagen bereitstellen, auf die die Personen angewiesen sind. Neben Trinkwasser, Nahrung und Unterkünften gehören auch Werkzeuge, Kleidung und Hygieneartikel zu den elementaren Bestandteilen der Versorgung von Menschengruppen.
„Resilient emergency support and quest“ ist der Entwurf eines autonomen Hilfsgütertransportes zur Versorgung von Menschengruppen nach oder während eines Katastrophenfalles. Es hat die Aufgabe, genannte Hilfsgüter sicher und zuverlässig von einer Basisstation zu einem Unglücksort zu transportieren. Ausgehend von der Basisstation, werden im Katastrophenfall ein oder mehrere Fahrzeuge auf einen vorprogrammierten Standort geleitet. Diesen Weg muss das Fahrzeug situationsgerecht und in Echtzeit beschreiten. Die oberste Priorität des Systems ist dabei eine zuverlässige Versorgung der Helfer und Hilfsbedürftigen.


Projektbeteiligte
Design: Björn Heine & Adrian Wiepcke (www.adrianwiepcke.de)
Betreuung: Prof. Jan Bäse
Projektpartner: DLR - Robert Hahn